球罐磁粉检测机器人
自主寻找焊缝进行磁粉探伤;
检测速度:0—4m/min;
提升力:≥156.8N(16kg)。

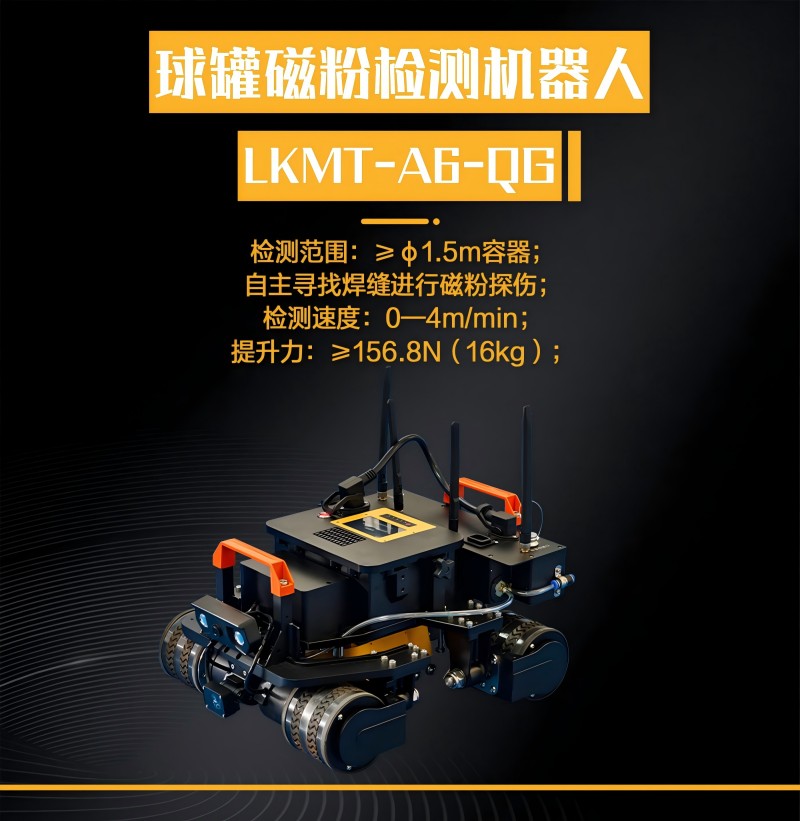
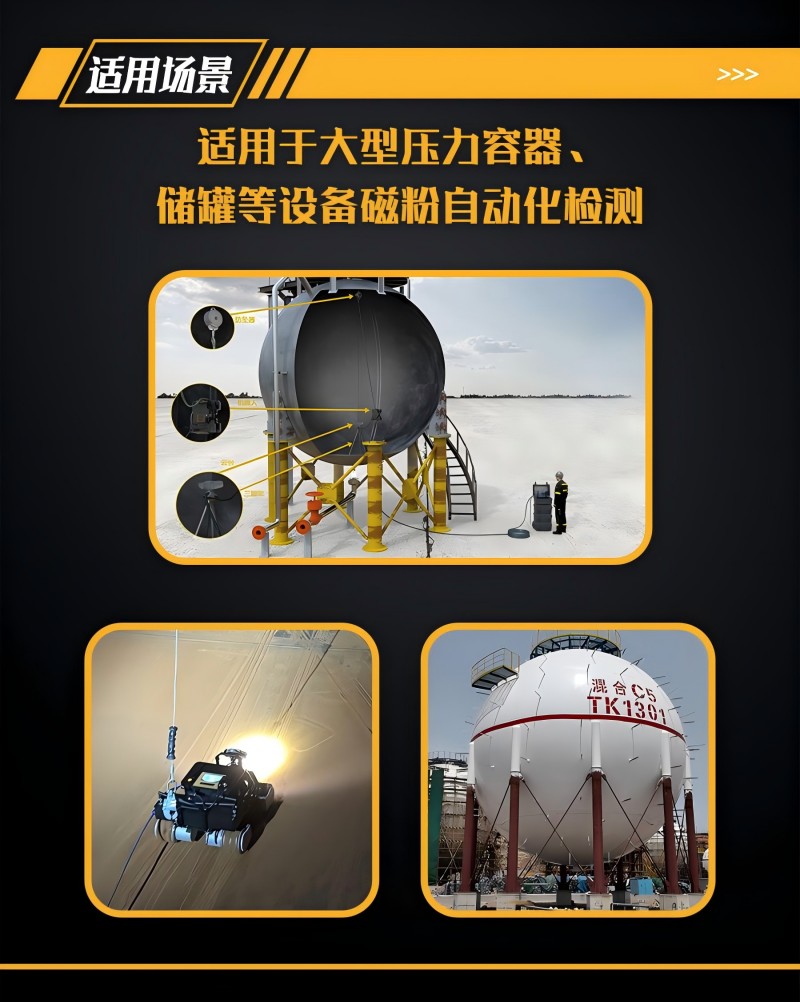




集成无线、有线两种供电与控制方式控制机器人运动和检测,遥控器端集成高清彩色屏幕,能够实时查看检测区域及行进方向前侧的图像信息,并且机器人搭载高精度浮动升降平台,能够实现检测过程中磁轭的自适应。适用于大型压力容器、储罐等设备磁粉自动化检测。
符合标准:GB/T 15822.3-2024无损检测 磁粉检测 第3部分 设备
JB/T 13936-2020无损检测仪器 磁粉检测用磁化设备技术要求
GB/T 40327-2021 轮式移动机器人导引运动性能测试方法
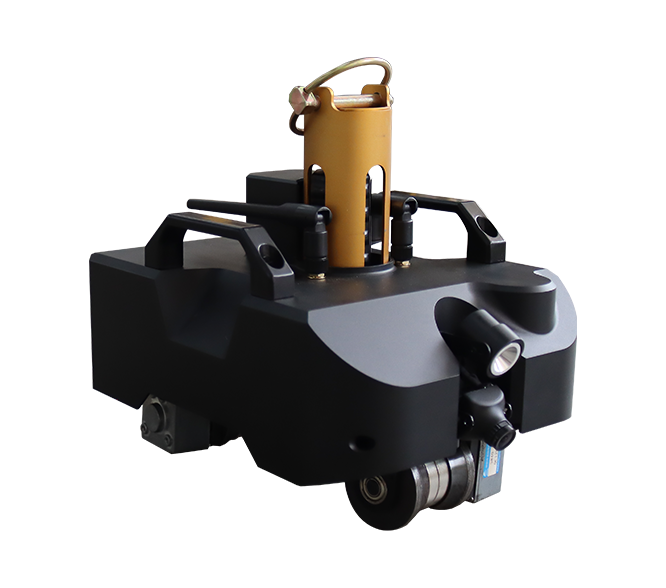
(1)、磁粉检测机器人检测系统由爬行器(包含:运动与定位平台、磁化与检测平台)、操控与显示平台、云台视频监控平台等三部分构成;
(2)、适用于大型球罐不搭脚手架进行磁粉检测探伤;能够实现检测人员在球罐外操作机器人在球罐内执行检测工作;
(1)、运动与定位平台
1、电机转速:70rpm;
2、电机扭矩:25N·m;
3、吸附力:单个永磁轮吸附力>60kg;
4、编码器定位精度:0.001mm;
5、行进速度:0—11m/min(无级调速);
6、转向速度:1—4m/min;
7、越障高度:30mm;
8、适用检测场景:φ1.5m工件轴向(内壁、外壁)检测,φ1.5m工件周向(内壁、外壁)检测;
9、行进方向照明装置亮度:≥2000Lux;
10、行进方向摄像头像素:200W;
11、行进过程图像分辨率:1280*720;
(2)、磁化与探伤平台
1、提升力:≥156.8N(16kg);
2、灵敏度:A1型标准试片30/100刻槽显示清晰;
3、探伤速度:<4m/min;
4、探头极距:80mm*80mm;
5、白光灯照度:≥2000Lux;
6、黑光灯辐照度:≥7000μW/cm2;
7、磁轭摄像头像素:500W;
8、磁轭升降高度:最大可调范围0-30mm;
9、磁轭越障高度:30mm;
10、磁轭防水级别:IP66;
11、磁悬液喷头数量:3个;
(3)、操控与显示平台
1、供电电压: 外部输入电源:80-264VAC,47-63Hz;
2、机载电源:有线版本14.8V 20Ah/无线版本14.8V-40Ah;
3、机载电源工作时间:2h/4h;
4、磁悬液储罐容量:20L;
扬程:30m;
流量可调,最大0.48Mpa、3.5L/min;
搅拌装置工作时间:8h;
(4)、云台视频监控平台
1、水平可360°无限位旋转,垂直角度范围-90°至+90°;
2、支持高速预置位转动:水平100°/S,垂直60°/S;
3、手动控制速度可调:水平0°–60°/S,垂直0°–40°/S;
4、预置位精度±0.1°,支持256个预置位、8条巡视轨迹;
5、输出码率:32kbps–12Mbps;
6、最高分辨率:1080P;
7、IP66防护等级;
8、重量:7kg;
(5)系统参数
1、仪器尺寸:500mm*380mm*240mm;
2、仪器重量:无电池28.3kg/有线电池版本32.2kg/无线电池版本31.2kg;
1.机器人主体1台;
2.机器人电池1块(14.8V,20Ah);
3.机器人电池连接线1条;
4.供电与输液复合主线缆30m 1条;
5.供电与输液复合主线缆20m 1条;
6.防坠装置1套;
7.防坠吊带1条;
8.机器人控制箱 1个;
9.控制箱电源线 1条;
10.机器人遥控器1个;
11.遥控器控制连接线1条;
12.磁悬液储液箱1个;
13.磁悬液储液箱控制线 1条;
14.线缆收纳箱1个;
15.工具收纳箱1个;
16.云台摄像机主机1台;
17.云台安装支架 1个;
18.辅助工具 1套;
19.主机电池充电器 1套;
20.遥控器充电器 1套;
21.控制箱输电线 1条(双typeC接头);
22.磁悬液储液箱充电器 1套;
23.质量文件 1 套;
24.使用手册 1套;