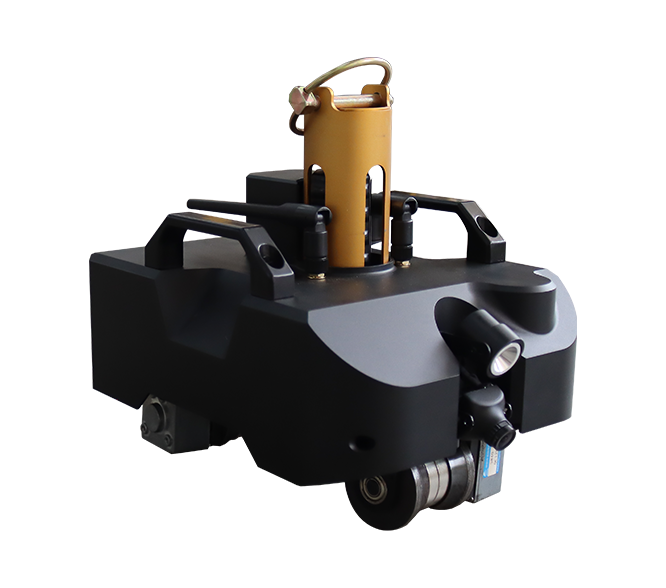
腐蚀测厚机器人
适应管径:轴向运行≥50mm,螺旋环向运行≥80mm;
遥控距离:>1千米(空旷无干扰);
行进速度:0-6m/min(无极调速)。







采用无线遥控器控制机器人运行及测厚工作,遥控器端集成高清彩色屏幕,能够实时查看测厚数据及行进方向的图像信息,并且机器人搭载高精度电磁感应传感器,能够实现测厚过程中探头高度的自适应控制。适用于高空压力管道等设备外表面的腐蚀测厚。
符合标准:GB/T 11344-2021 无损检测 超声测厚
GB/T 40327-2021 轮式移动机器人导引运动性能测试方法
1、磁力爬壁设计,可垂直、水平、倒置吸附于铁磁性表面,适应管道、储罐、船舶等曲面及高空场景。
2、无线遥控控制,配备高清摄像头实时监控检测路径。
3、采用电磁超声技术(EMAT),无需耦合剂,可直接穿透涂层进行测厚,适用于带防腐层或包覆层的设备检测。
5、实时显示厚度数据,可以远程查看与存储。
6、采用主备用电源机制,有效保证机器人安全回收。
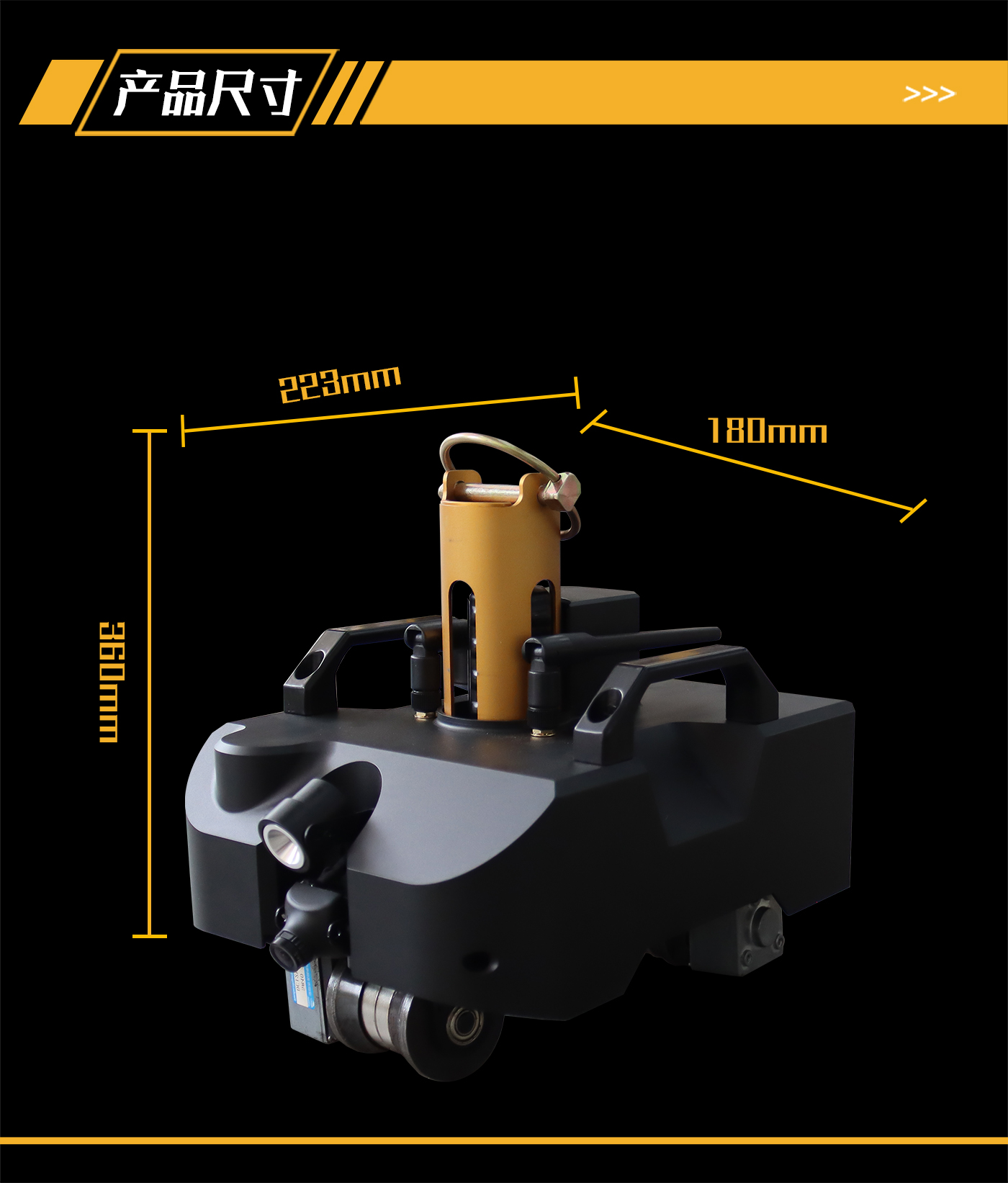
1、主机参数:(1)设备尺寸:306*180*223mm;
(2)设备重量:5kg;
(3)遥控距离:大于1km(空旷无干扰);
(4)主备用一体式电池,12V,6Ah;
(5)工作温度:-20℃~+60℃;
(6) 最大吸附力:10kg(垂直);
(7)行进速度:0-6m/min(无级调速);
(8)最小适应管径:轴向运行≥50mm,螺旋环向运行≥80mm;
(9)测厚平台高度手动、自动调节,调节范围±20mm。
2、视频性能:(1)像素:>500万;
(2)显示屏幕:5.5寸高亮显示屏,分辨率1920*1080(1000nits);
3、测厚性能(以比昂特EMA1000为例):
(1)测量范围:1.5—230mm;
(2)显示精度:0.01mm;
(3)误差范围:±(0.5%H+0.05)mm,H为工件厚度;
(4)穿透涂层厚度:4mm;
(5)探头测量倾斜角度:±25°;
1、标配清单:
(1)机器人主体1台;
(2)带屏遥控器1套(遥控器主体及充电器套装);
(3)机器人主体电池1块;
(4)充电器1套;
(5)安全绳挂钩1个;
(6)合格证、保修卡、说明书一套。
2、选配项:
(1)笔式电磁超声测厚仪1套(测厚仪主体、常规探头、充电器套装);
(2)机器人主体电池;
